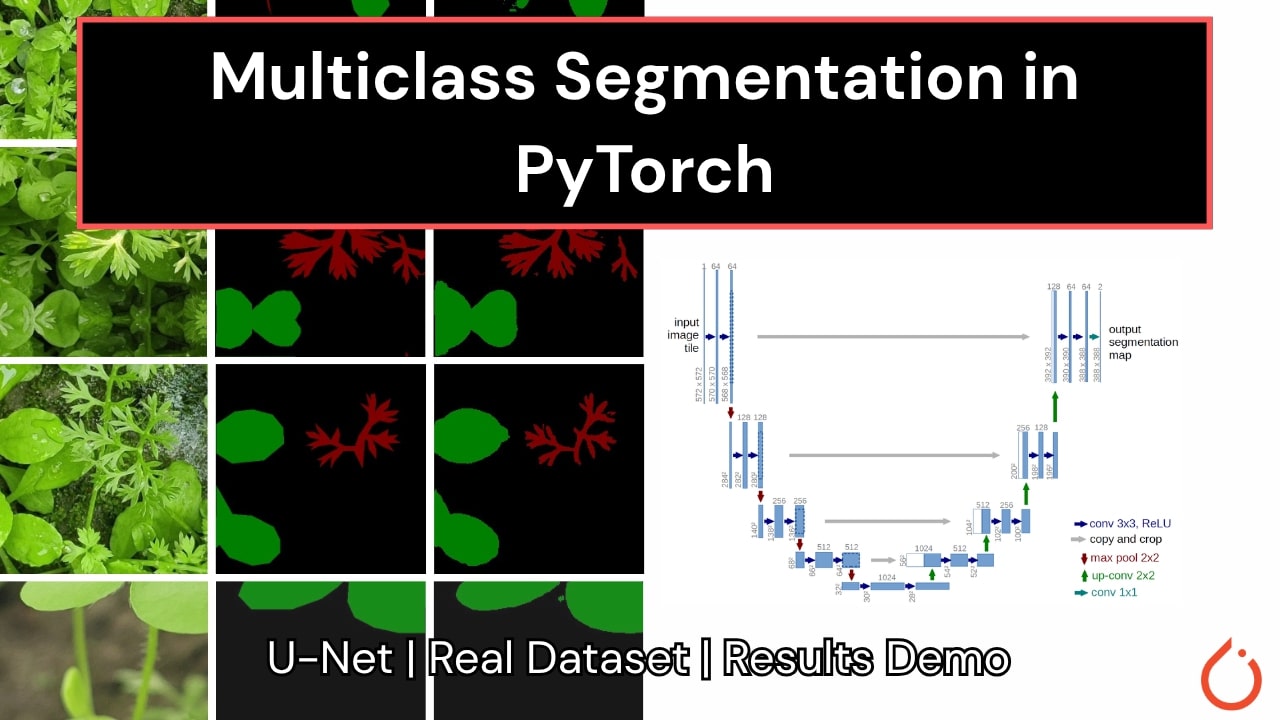
Semantic segmentation is a crucial task in computer vision that involves labeling each pixel in an image with its corresponding class. In this blog post, we’ll dive into building a multiclass semantic segmentation pipeline using the U-Net architecture with PyTorch. Our goal is to segment different types of weeds from agricultural images — a use case highly relevant to precision farming.
What is Multiclass Segmentation?
Multiclass segmentation assigns each pixel in an image to one of several classes. Unlike binary segmentation (foreground vs. background), multiclass segmentation deals with more than two semantic categories.

In our case, the categories are:
- Background
- Weed type 1
- Weed type 2
Project Structure
Multiclass-Segmentation-in-PyTorch
├── files/ # Stores checkpoint and score metrics
├── results/ # Saved predictions
├── Weeds-Dataset/ # Dataset directory
├── model.py # U-Net model
├── utils.py # Utility functions
├── metrics.py # Loss functions
├── train.py # Training script
├── test.py # Evaluation script
Dataset
We use a custom dataset located in Weeds-Dataset/weed_augmented. It contains two subfolders:
- images/: RGB images (.jpg)
- masks/: Segmentation masks (.png), where different colors represent different classes.
The dataset can be downloaded from here: Multiclass Weed Dataset
Class Color Mapping:
- Background: [0, 0, 0]
- Weed-1: [0, 0, 128]
- Weed-2: [0, 128, 0]
The color-coded masks are converted to class indices internally before training.
ALSO READ:
- Extracting RGB Codes from Multi-Class Segmentation Masks with Python
- Converting RGB Mask to Class Index Masks in Python
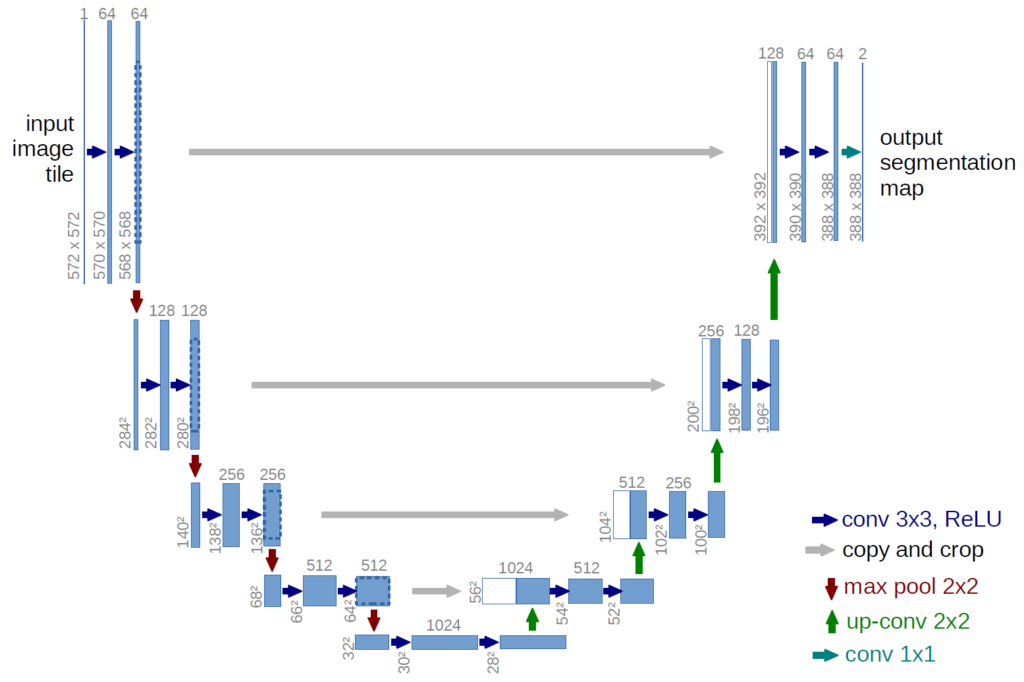
Model: U-Net Architecture
The U-Net model is built from scratch in model.py using PyTorch’s nn.Module. The architecture follows the classic encoder–bottleneck–decoder format. Let’s break it down step-by-step.
Imports
import torch
import torch.nn as nn
We use PyTorch’s core modules for building neural network layers (nn.Module, Conv2d, BatchNorm2d, ReLU, etc.).
Convolutional Blocks
The conv_block is the basic building block. This block applies two convolutional layers, followed by BatchNorm and ReLU activations:
class conv_block(nn.Module):
def __init__(self, in_c, out_c):
super().__init__()
self.conv = nn.Sequential(
nn.Conv2d(in_c, out_c, kernel_size=3, padding=1),
nn.BatchNorm2d(out_c),
nn.ReLU(inplace=True),
nn.Conv2d(out_c, out_c, kernel_size=3, padding=1),
nn.BatchNorm2d(out_c),
nn.ReLU(inplace=True)
)
def forward(self, inputs):
return self.conv(inputs)
Arguments:
in_c: Number of input channelsout_c: Number of output channels
This block helps extract high-level spatial features while maintaining spatial resolution using the same padding (padding=1).
Encoder Block: Downsampling
Each encoder block applies a conv_block followed by MaxPooling to reduce spatial dimensions:
class encoder_block(nn.Module):
def __init__(self, in_c, out_c):
super().__init__()
self.conv = conv_block(in_c, out_c)
self.pool = nn.MaxPool2d((2, 2))
def forward(self, inputs):
x = self.conv(inputs)
p = self.pool(x)
return x, p
Returns:
x: Feature map before pooling (used in skip connection)p: Pooled feature map passed to the next encoder
Decoder Blocks: Upsampling + Skip Connection
Each decoder block upsamples the input, concatenates it with the corresponding encoder output (skip connection), and applies a convolution block:
class decoder_block(nn.Module):
def __init__(self, in_c, out_c):
super().__init__()
self.up = nn.ConvTranspose2d(in_c, out_c, kernel_size=2, stride=2, padding=0)
self.conv = conv_block(out_c + out_c, out_c)
def forward(self, inputs, skip):
x = self.up(inputs)
x = torch.cat([x, skip], axis=1)
x = self.conv(x)
return x
Key operations:
ConvTranspose2d: Upsamples the feature maptorch.cat: Concatenates skip connection along the channel axis
U-Net Model
This is the full U-Net model that connects the encoder, bottleneck, and decoder:
class build_unet(nn.Module):
def __init__(self, num_classes=3):
super().__init__()
# Encoder
self.e1 = encoder_block(3, 64)
self.e2 = encoder_block(64, 128)
self.e3 = encoder_block(128, 256)
self.e4 = encoder_block(256, 512)
# Bottleneck
self.b = conv_block(512, 1024)
# Decoder
self.d1 = decoder_block(1024, 512)
self.d2 = decoder_block(512, 256)
self.d3 = decoder_block(256, 128)
self.d4 = decoder_block(128, 64)
# Output Layer
self.outputs = nn.Conv2d(64, num_classes, kernel_size=1, padding=0)
def forward(self, inputs):
s1, p1 = self.e1(inputs)
s2, p2 = self.e2(p1)
s3, p3 = self.e3(p2)
s4, p4 = self.e4(p3)
b = self.b(p4)
d1 = self.d1(b, s4)
d2 = self.d2(d1, s3)
d3 = self.d3(d2, s2)
d4 = self.d4(d3, s1)
outputs = self.outputs(d4)
return outputs
Explanation:
- Input goes through 4 encoder blocks → bottleneck → 4 decoder blocks
- Skip connections ensure the decoder retains spatial details
- Final
Conv2dprojects the decoder output tonum_classeslogits for each pixel
Utility Functions
The utils.py script is a helper module containing reusable functions and classes to support training, checkpointing, reproducibility, and more. These utilities improve code organization, readability, and modularity.
Imports:
import os
import random
import numpy as np
import torch
from sklearn.utils import shuffle
os,random: For file/directory management and seeding randomnessnumpy: Array manipulationstorch: Deep learning operationsshuffle: Maintains order when shuffling datasets
Seeding:
def seeding(seed):
random.seed(seed)
os.environ["PYTHONHASHSEED"] = str(seed)
np.random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed(seed)
torch.backends.cudnn.deterministic = True
This function ensures reproducibility by seeding all random number generators across Python, NumPy, and PyTorch. Also sets torch.backends.cudnn.deterministic = True to make CUDA operations deterministic.
Use this at the start of any training or testing script.
Create Directory:
def create_dir(path):
if not os.path.exists(path):
os.makedirs(path)
Creates a directory if it doesn’t already exist. Ensures that logs, checkpoints, or result folders are properly generated.
Shuffling:
def shuffling(x, y):
x, y = shuffle(x, y, random_state=42)
return x, y
Takes two arrays (e.g., image and mask paths) and returns shuffled versions of both, ensuring correspondence between image and mask is preserved.
Epoch Time Calculation:
def epoch_time(start_time, end_time):
elapsed_time = end_time - start_time
elapsed_mins = int(elapsed_time / 60)
elapsed_secs = int(elapsed_time - (elapsed_mins * 60))
return elapsed_mins, elapsed_secs
Returns training time in a human-readable format: minutes and seconds.
Save Checkpoint:
def save_checkpoint(model, optimizer, epoch, loss, checkpoint_path):
torch.save({
'epoch': epoch,
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'loss': loss,
}, checkpoint_path)
print(f"Checkpoint saved at epoch {epoch}")
Saves the model state and optimizer state into a .pth file. This allows training to be resumed later.
Load Checkpoint:
def load_checkpoint(model, optimizer, checkpoint_path):
if os.path.exists(checkpoint_path):
checkpoint = torch.load(checkpoint_path)
model.load_state_dict(checkpoint['model_state_dict'])
optimizer.load_state_dict(checkpoint['optimizer_state_dict'])
epoch = checkpoint['epoch']
print(f"Checkpoint loaded from epoch {epoch}")
return model, optimizer, epoch
else:
print("No checkpoint found, starting from scratch.")
return model, optimizer, 0
Loads model and optimizer states from a checkpoint file. Returns the epoch number for resuming training.
Early Stopping:
class EarlyStopping:
def __init__(self, patience=5, verbose=False, delta=0):
self.patience = patience
self.verbose = verbose
self.delta = delta
self.counter = 0
self.best_loss = float('inf')
self.early_stop = False
def __call__(self, val_loss, model, optimizer, epoch, checkpoint_path):
if self.best_loss - val_loss > self.delta:
self.best_loss = val_loss
self.counter = 0
save_checkpoint(model, optimizer, epoch, val_loss, checkpoint_path)
else:
self.counter += 1
if self.verbose:
print(f"EarlyStopping counter: {self.counter} of {self.patience}")
if self.counter >= self.patience:
self.early_stop = True
print("Early stopping triggered")
A custom class that monitors validation loss and stops training early if there’s no improvement after a defined number of epochs (patience).
How it works:
- An improvement in validation loss saves the model.
- Otherwise, increments a counter.
- Once the counter reaches
patience, it setsearly_stop = True.
Loss Functions
In semantic segmentation, choosing the right loss function is crucial — especially in multiclass settings or when classes are imbalanced. The metrics.py file defines two custom loss functions:
DiceLoss: For measuring the overlap between predicted and ground truth masks.DiceCELoss: A combination of Dice Loss and Cross Entropy Loss for more robust optimization.
Imports:
import torch
import torch.nn as nn
import torch.nn.functional as F
torch.nn: Required to define loss functions as PyTorch modulesF.softmax,F.one_hot: Used for normalizing outputs and handling target labels
Dice Loss
The Dice coefficient measures the overlap between two samples. It ranges from 0 (no overlap) to 1 (perfect overlap). Dice Loss is defined as:
class DiceLoss(nn.Module):
def __init__(self, num_classes, smooth=1e-5, ignore_index=None):
super(DiceLoss, self).__init__()
self.num_classes = num_classes
self.smooth = smooth
self.ignore_index = ignore_index
def forward(self, logits, targets):
"""
logits: [B, C, H, W] (raw outputs from model)
targets: [B, H, W] (ground truth class indices)
"""
probs = F.softmax(logits, dim=1) # [B, C, H, W]
targets_one_hot = F.one_hot(targets, num_classes=self.num_classes).permute(0, 3, 1, 2).float()
if self.ignore_index is not None:
mask = (targets != self.ignore_index).unsqueeze(1) # [B, 1, H, W]
probs = probs * mask
targets_one_hot = targets_one_hot * mask
intersection = torch.sum(probs * targets_one_hot, dim=(0, 2, 3))
union = torch.sum(probs + targets_one_hot, dim=(0, 2, 3))
dice = (2 * intersection + self.smooth) / (union + self.smooth)
return 1.0 - dice.mean()
Arguments:
num_classes: Total number of segmentation classes.smooth: A small value to prevent division by zero.ignore_index: If provided, skips that class when computing loss (useful for unlabeled areas).
Forward Method:
logits: Raw output from the model, shape[B, C, H, W]targets: Ground truth class indices, shape[B, H, W]
It’s Working:
- Apply
softmaxto convert logits to probabilities. - Convert target labels to one-hot encoding.
- Optionally apply a mask to ignore certain indices.
- Compute the intersection and union.
- Return
1 - Dice coefficient.
Dice + CrossEntropy Loss
Combines Dice Loss and Cross Entropy Loss into a single objective:
class DiceCELoss(nn.Module):
def __init__(self, num_classes, weight=None, dice_weight=1.0, ce_weight=1.0, ignore_index=None):
super(DiceCELoss, self).__init__()
self.dice = DiceLoss(num_classes=num_classes, ignore_index=ignore_index)
self.ce = nn.CrossEntropyLoss(weight=weight, ignore_index=ignore_index)
self.dice_weight = dice_weight
self.ce_weight = ce_weight
def forward(self, logits, targets):
loss_dice = self.dice(logits, targets)
loss_ce = self.ce(logits, targets)
return self.dice_weight * loss_dice + self.ce_weight * loss_ce
Arguments:
num_classes: Number of segmentation classesweight: Class-wise weights (optional)dice_weight: Multiplier for Dice lossce_weight: Multiplier for Cross Entropy lossignore_index: Skip this class while computing loss
Why Use Dice + Cross Entropy?
| Loss Type | Benefit |
|---|---|
| Cross Entropy | Penalizes incorrect class predictions |
| Dice Loss | Focuses on pixel overlap |
| Combined Loss | Best of both worlds |
This is especially important when some classes are underrepresented (e.g., small weeds vs large background areas).
Training Pipeline
The train.py script orchestrates the training and validation loop for our U-Net model. It includes:
- Data loading and splitting
- Augmentation strategies
- Model training and evaluation
- Checkpointing and early stopping
Let’s break it down step by step.
Imports
We import the required libraries:
import os, random, time, datetime
import numpy as np, pandas as pd
import albumentations as A
import cv2
from PIL import Image
from glob import glob
from tqdm import tqdm
import torch
import torch.nn as nn
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms
from sklearn.model_selection import train_test_split
We also import custom modules:
from utils import seeding, create_dir, shuffling, epoch_time, EarlyStopping, save_checkpoint, load_checkpoint
from metrics import DiceLoss, DiceCELoss
from model import build_unet
Loading Dataset
def load_data(dataset_path, split=0.2):
images = sorted(glob(os.path.join(dataset_path, "images", "*.jpg")))
masks = sorted(glob(os.path.join(dataset_path, "masks", "*.png")))
assert len(images) == len(masks)
split_num = int(split * len(images))
train_x, valid_x, train_y, valid_y = train_test_split(images, masks, test_size=split_num, random_state=42)
train_x, test_x, train_y, test_y = train_test_split(train_x, train_y, test_size=split_num, random_state=42)
return (train_x, train_y), (valid_x, valid_y), (test_x, test_y)
This function loads image and mask paths, then splits them into train, validation, and test sets using train_test_split().
split: Fraction for validation/test (default: 20% of dataset)- Returns:
train_x, train_y,valid_x, valid_y,test_x, test_y
So, we use 60% of the data for training, and the remaining 40% data is split equally between the validation and testing datasets.
Dataset Class
This is a custom PyTorch Dataset for loading and preprocessing image-mask pairs.
class DATASET(Dataset):
def __init__(self, images_path, masks_path, size, colormap, transform=None):
super().__init__()
self.images_path = images_path
self.masks_path = masks_path
self.size = size
self.colormap = colormap
self.transform = transform
self.n_samples = len(images_path)
def __getitem__(self, index):
""" Image """
image = cv2.imread(self.images_path[index], cv2.IMREAD_COLOR)
mask = cv2.imread(self.masks_path[index], cv2.IMREAD_COLOR)
# print(np.unique(mask.reshape(-1, 3), axis=0))
if self.transform is not None:
augmentations = self.transform(image=image, mask=mask)
image = augmentations["image"]
mask = augmentations["mask"]
image = cv2.resize(image, self.size)
image = np.transpose(image, (2, 0, 1))
image = image/255.0
mask = cv2.resize(mask, self.size)
mask = np.array(mask, dtype=np.uint8)
mask_class = np.zeros(mask.shape[:2], dtype=np.uint8)
for idx, color in enumerate(self.colormap):
mask_class[np.all(mask == color, axis=-1)] = idx
return image, mask_class ## [C, H, W] and [H, W]
def __len__(self):
return self.n_samples
Key Responsibilities:
- Load and resize images/masks
- Apply augmentations via
albumentations - Convert RGB masks to class-index maps using
colormap
The mask conversion step is crucial:
for idx, color in enumerate(self.colormap):
mask_class[np.all(mask == color, axis=-1)] = idx
This maps [0, 0, 128] to Class 1, [0, 128, 0] to Class 2, and so on.
Training Function
def train(model, loader, optimizer, loss_fn, device):
model.train()
epoch_loss = 0.0
scaler = torch.cuda.amp.GradScaler()
for i, (x, y) in enumerate(loader):
x = x.to(device, dtype=torch.float32)
y = y.to(device, dtype=torch.long) ## Important: y should be long for CrossEntropyLoss
with torch.cuda.amp.autocast():
y_pred = model(x)
loss = loss_fn(y_pred, y)
optimizer.zero_grad()
scaler.scale(loss).backward()
scaler.step(optimizer)
scaler.update()
epoch_loss += loss.item()
epoch_loss = epoch_loss/len(loader)
return epoch_loss
Trains the model for one epoch:
- Uses
torch.cuda.amp.autocast()andGradScaler()for mixed precision training - Accumulates and returns the average loss over all batches
Validation Function
def evaluate(model, loader, loss_fn, device):
model.eval()
epoch_loss = 0.0
with torch.no_grad():
for i, (x, y) in enumerate(loader):
x = x.to(device, dtype=torch.float32)
y = y.to(device, dtype=torch.long)
y_pred = model(x)
loss = loss_fn(y_pred, y)
epoch_loss += loss.item()
epoch_loss = epoch_loss/len(loader)
return epoch_loss
Evaluate the model on the validation set:
- No gradient calculation (
torch.no_grad()) - Returns average loss
Now let’s break down the main execution block step-by-step.
Execution: Training the U-Net
From this point, the program will begin to execute.
Seeding and Directories:
seeding(42)
create_dir("files")
Ensures reproducibility and prepares a directory to store checkpoints and logs.
Hyperparameters:
image_w, image_h = 256, 256
batch_size = 16
num_epochs = 500
lr = 1e-2
early_stopping_patience = 50
- Input image resolution: 256×256
- Learning rate: 0.01 (using SGD)
- Early stopping if validation loss doesn’t improve in 50 epochs
Dataset Preparation:
(train_x, train_y), (valid_x, valid_y), (test_x, test_y) = load_data(dataset_path)
Data Augmentation:
Using albumentations for strong real-world augmentation:
transform = A.Compose([
A.HorizontalFlip(p=0.5),
A.VerticalFlip(p=0.5),
A.ShiftScaleRotate(shift_limit=0.05, scale_limit=0.1, rotate_limit=10, p=0.5),
A.RandomBrightnessContrast(p=0.2),
A.GaussianBlur(p=0.2),
A.CoarseDropout(p=0.2, max_holes=8, max_height=24, max_width=24),
])
Dataloaders:
train_loader = DataLoader(train_dataset, batch_size=16, shuffle=True)
valid_loader = DataLoader(valid_dataset, batch_size=16, shuffle=False)
Model, Optimizer, Scheduler:
model = build_unet(num_classes=3).to(device)
optimizer = torch.optim.SGD(model.parameters(), lr=lr, momentum=0.9, weight_decay=0.0005)
scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau(optimizer, 'min', patience=5)
early_stopping = EarlyStopping(patience=early_stopping_patience)
Loss Function:
loss_fn = DiceCELoss(num_classes=3, dice_weight=1.0, ce_weight=1.0, ignore_index=-1)
Checkpoint Loading:
model, optimizer, start_epoch = load_checkpoint(model, optimizer, checkpoint_path)
Training Loop:
for epoch in range(start_epoch+1, num_epochs, 1):
start_time = time.time()
train_loss = train(model, train_loader, optimizer, loss_fn, device)
valid_loss = evaluate(model, valid_loader, loss_fn, device)
end_time = time.time()
epoch_mins, epoch_secs = epoch_time(start_time, end_time)
data_str = f"[{epoch:02}/{num_epochs:02}] | Epoch Time: {epoch_mins}m {epoch_secs}s - Train Loss: {train_loss:.4f} - Val. Loss: {valid_loss:.4f}"
print(data_str)
scheduler.step(valid_loss)
early_stopping(valid_loss, model, optimizer, epoch, checkpoint_path)
if early_stopping.early_stop:
print("Early stopping triggered. Training will stop.")
break
Each epoch:
- Trains and evaluates the model
- Log losses and time
- Adjusts learning rate if needed
- Checks early stopping
If early stopping is triggered, training halts.
Model Evaluation and Visualization
After training our multiclass U-Net model, we now move to testing and evaluation. This test.py script handles:
- Model loading
- Inference on test images
- Visual and numerical comparison with ground truth
- Computing F1-score and IoU (Jaccard Score)
- Saving predictions and metrics
Let’s go through it step-by-step.
Imports
import os, time
from glob import glob
import cv2
import numpy as np
import torch
import torch.nn.functional as F
from tqdm import tqdm
from model import build_unet
from utils import create_dir, seeding
from train import load_data
from sklearn.metrics import accuracy_score, f1_score, jaccard_score
Convert Class Index to RGB
def index_to_rgb_mask(mask, colormap):
height, width = mask.shape
rgb_mask = np.zeros((height, width, 3), dtype=np.uint8)
for class_id, rgb in enumerate(colormap):
rgb_mask[mask == class_id] = rgb
return rgb_mask
This function converts a predicted class-index mask (e.g., [0, 1, 2]) back to its color-coded RGB form for visual comparison.
Evaluation Function
def evaluate(model, save_path, test_x, test_y, size, colormap, classes):
This is the core of the evaluation pipeline. Let’s walk through it in parts:
Inference and Preprocessing:
image = cv2.imread(x)
image = cv2.resize(image, size)
image = np.transpose(image, (2, 0, 1))
image = image / 255.0
image = np.expand_dims(image, axis=0)
image = torch.from_numpy(image).float().to(device)
Image is loaded, resized, normalized, and reshaped to [1, C, H, W] for model input
Mask Ground Truth Processing:
mask = cv2.imread(y)
mask = cv2.resize(mask, size)
It is converted from RGB to class indices using color mapping.
output_mask = []
for i, color in enumerate(colormap):
cmap = np.all(mask == color, axis=-1)
output_mask.append(cmap)
output_mask = np.stack(output_mask, axis=-1)
output_mask = np.argmax(output_mask, axis=-1)
Model Prediction:
with torch.no_grad():
y_pred = model(image)
y_pred = torch.softmax(y_pred, dim=1)
y_pred = torch.argmax(y_pred, dim=1)
y_pred = y_pred.squeeze(0).cpu().numpy()
The model predicts class scores → applies softmax() → takes argmax() for the final predicted class per pixel.
Save Visualizations:
cat_images = np.concatenate([save_img, line, save_mask, line, index_to_rgb_mask(y_pred, colormap)], axis=1)
cv2.imwrite(f"{save_path}/joint/{name}.jpg", cat_images)
cv2.imwrite(f"{save_path}/mask/{name}.jpg", index_to_rgb_mask(y_pred, colormap))
We save:
- Original image
- Ground truth mask
- Predicted mask
Side-by-side, with a white separator line.
Compute Metrics:
f1_value = f1_score(y_true, y_pred, labels=labels, average=None, zero_division=0)
jac_value = jaccard_score(y_true, y_pred, labels=labels, average=None, zero_division=0)
For each image, we compute:
- F1 Score (per class)
- IoU / Jaccard Score (per class)
All metrics are saved into files/score.csv.
Also prints the model’s frames per second (FPS) performance during inference.
Main Execution
Seeding the environment for reproducibility
seeding(42)
Set Paths and Parameters:
image_w = 256
image_h = 256
size = (image_w, image_h)
checkpoint_path = "files/checkpoint.pth"
dataset_path = "./Weeds-Dataset/weed_augmented"
colormap = [
[0, 0, 0], # Background
[0, 0, 128], # Class 1
[0, 128, 0] # Class 2
]
num_classes = len(colormap)
classes = ["background", "Weed-1", "Weed-2"]
Load Trained Model:
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = build_unet(num_classes=num_classes)
model = model.to(device)
model.load_state_dict(torch.load(checkpoint_path, map_location=device)["model_state_dict"])
model.eval()
Load the Test Set:
(train_x, train_y), (valid_x, valid_y), (test_x, test_y) = load_data(dataset_path)
Folders to Save Results:
save_path = f"results"
for item in ["mask", "joint"]:
create_dir(f"{save_path}/{item}")
Run Evaluation:
evaluate(model, save_path, test_x, test_y, size, colormap, classes)
Quantitative Results
Class F1 IoU
-----------------------------------
background : 0.97248 - 0.94768
Weed-1 : 0.59912 - 0.52433
Weed-2 : 0.41946 - 0.38736
-----------------------------------
Mean : 0.50929 - 0.45584
Mean FPS: 154.13565159912042
Qualitative Results
Here, we can visualize the qualitative results. The sequence of images is: Input Image, Ground Truth, and Prediction.

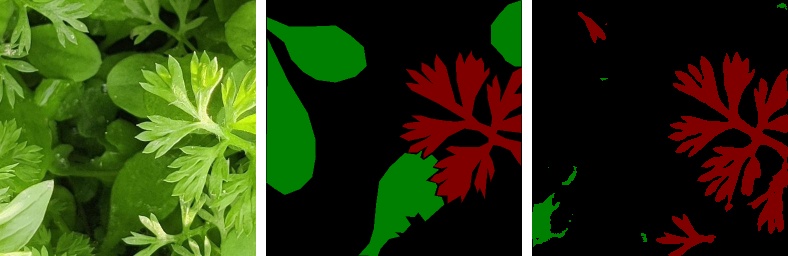
Observations:
- Captures overall weed contours and structure quite well.
- Handles complex textures and occlusions with reasonable accuracy.
- No major confusion between background and weed classes.
Areas for Improvement:
- Minor misses in small or isolated weed patches.
- Slight class imbalance is visible — red class seems more confidently predicted than green.
- Could benefit from:
- More training epochs
- Data augmentation focusing on a small region highlighting
- Post-processing (e.g., CRFs or morphological ops)
Conclusion
In this blog, we built a U-Net-based multi-class segmentation model from scratch using PyTorch. We trained it on an agricultural weed dataset and evaluated its performance using both qualitative and quantitative metrics. The model is lightweight, accurate, and efficient — making it suitable for real-world deployment in precision agriculture.
If you found this helpful, consider starring the GitHub repo or sharing it with others working in computer vision!”
Code: Multiclass Segmentation in PyTorch
Next Steps / Future Work
- Add test-time augmentations for a further boost in accuracy
- Try transfer learning by using a pre-trained encoder (e.g., ResNet)